Приведённые ниже текст является частью книги «Первый шаг в квантовую реальность».
Чтобы скачать полный текст, пройдите по ссылке.
14. Оператор и матрица плотности.
Оператором плотности называется проектор
![]() = |d›‹d|,
= |d›‹d|,
при условии, что вектор состояния |d› нормирован на единицу, ‹d|d› = 1.
Отсюда понятно, что операторы плотности, точно так же как векторы состояний пригодны для полноценного описания квантово–механических систем.
Очевидно, что
![]() 2 =(|d›‹d|)·(|d›‹d|)=|d›‹d|d›‹d| = |d›·1·‹d| =
2 =(|d›‹d|)·(|d›‹d|)=|d›‹d|d›‹d| = |d›·1·‹d| = ![]() .
.
В отличие от векторов состояний, которые определёны с точностью до произвольного комплексного множителя с единичным модулем, операторы плотности не обладает аналогичным произволом, т.к. если |d′› = еiφ|d›, то ‹d′| = е–iφ‹d| и ![]() =
= ![]() .
.
Теперь, чтобы наглядно проиллюстрировать вычисления, снова вернёмся к двумерному гильбертову пространству.
Соответствующая матрица в некотором ортонормированном базисе |е1›, |е2› такова:
D ij = ‹еi|![]() |еj› = ‹еi|d›‹d|еj› = di · (dj)*, i, j = 1, 2.
|еj› = ‹еi|d›‹d|еj› = di · (dj)*, i, j = 1, 2.
Естественно, что матрица D ij называется матрицей плотности.
Определение.
SpD — след матрицы D, иначе говоря, сумма диагональных элементов, матрицы D. Обозначение возникло от немецкого Spur — след. Иногда применяется обозначение TrD, происходящее от английского Trace — след.
Вычислим SpD в некотором полном ортонормированном базисе |е1›, |е2›:
SpD = D11 + D22 = ‹е1|d›‹d|е1› + ‹е2|d›‹d|е2› =
‹d|е1›‹е1|d› + ‹d|е2›‹е2|d› =‹d|(|е1›‹е1| + |е2›‹е2|)|d› = ‹d|![]() |d› = ‹d|d› = 1.
|d› = ‹d|d› = 1.
Итак, условие нормировки вектора состояния |d› на единицу, ‹d|d› = 1, эквивалентно равенству:
SpD =1.
Выразим теперь среднее значение физической величины Q при условии, что квантово–механическая система находится в состоянии |d›.
Как известно,
Qср = ‹d|![]() |d›.
|d›.
Поэтому
Qср = ‹d|(|е1›‹е1| + |е2›‹е2|)![]() (|е1›‹е1| + |е2›‹е2|)|d›
(|е1›‹е1| + |е2›‹е2|)|d›
В этой сумме четыре слагаемых:
‹d|еi›‹еi|![]() |еj›‹еj|d› = ‹еi |
|еj›‹еj|d› = ‹еi |![]() |еj›‹еj|d›‹d|еi › =
|еj›‹еj|d›‹d|еi › =
‹еi|![]() |еj›‹еj|
|еj›‹еj|![]() |еi› = Q ij · D ji = D ji · Qij , i, j = 1, 2.
|еi› = Q ij · D ji = D ji · Qij , i, j = 1, 2.
Поэтому
![]()
Аналогично Qср = Sp(DQ), т.е.
Qср = Sp(QD) = Sp(DQ).
Вычислим теперь среднее значение оператора плотности ![]() = |b›‹b| при условии, что квантово–механическая система находится в состоянии |d›:
= |b›‹b| при условии, что квантово–механическая система находится в состоянии |d›:
Вср = ‹d|![]() |d› = Sp(ВD) = Sp(DВ).
|d› = Sp(ВD) = Sp(DВ).
С другой стороны, известно, что
Вср = ‹d|![]() |d› = ‹d|b›‹b|d› = |‹b|d›|2 = Р.
|d› = ‹d|b›‹b|d› = |‹b|d›|2 = Р.
Отсюда
Р = Sp(ВD) = Sp(DВ).
Здесь — Р вероятность того, что физическая величина В примет значение b, при условии, что физическая величина D имеет вполне определённое значение d.
Итак, матрица плотности позволяет вычислять вероятности перехода из одного состояния в другое и средние значения физических величин. Поэтому матрицы плотности, также как и векторы состояний, пригодны для полноценного описания квантово–механических систем.
Оказывается, возможности применения матриц плотности даже шире, чем у векторов состояния, — матрицы плотности применимы для описания статистических ансамблей квантово–механических систем.
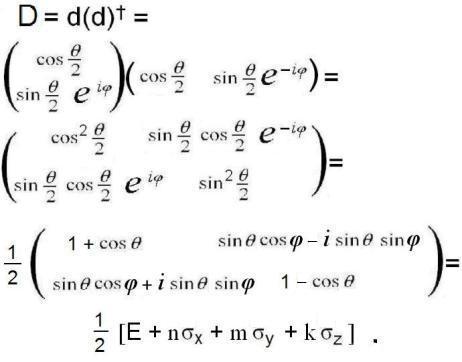
Наконец, для системы со спином ½ , поляризованной в направлении вектора d с направляющими косинусами n = sinθ cosφ, m = sinθ sinφ, k = cosθ, матрица плотности имеет вид:
Последние комментарии