Приведённые ниже текст является частью книги «Первый шаг в квантовую реальность».
Чтобы скачать полный текст, пройдите по ссылке.
14. Спиноры.
Оказывается, кроме рассмотренных выше, есть ещё один способ описания направлений и поворотов в двумерном комплексном евклидовом пространстве.
Исходим из того, что направление в трёхмерном пространстве задаётся матрицей-столбцом d
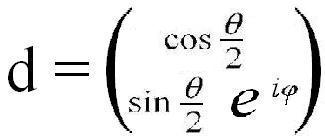
элементы которой в общем случае будем обозначать обозначим через ψ1 и ψ2.
Повороты трёхмерного евклидового пространства представлены в двумерном комплексном пространстве унитарными матрицами
UX(α/2) = Е cosα /2 + iσx sinα /2,
UY(α/2) = Е cosα/2 + iσy sinα/2,
UZ(α/2) = Е cosα /2 + iσz sin/2
или любыми их произведениями. Для всех таких матриц, обозначим их через U, характерно, что они являются унитарными с определителем, равным единице, Δ = 1.
Пусть
![]()
тогда новые матричные элементы после поворота будут выражаться формулой:
d′ = Ud,
В принятых обозначениях это равенство имеет вид:
![]()
чему соответствует линейное преобразование
(ψ1)′ = αψ1 + βψ2
(ψ2)′ = γψ1 + δψ2.
Обратим матрицу U, воспользовавшись готовым результатом (см. Просто и доступно о матрицах. VI). Для этого элементы главной диагонали следует поменять местами, а элементы второстепенной диагонали нужно умножить на –1, кроме того, полученную матрицу следовало бы разделить на определитель Δ, но Δ = 1. И тогда, учитывая унитарность матрицы U, получим:
![]() .
.
Матрица-строка d† с элементами (ψ1)* и (ψ2)* при повороте преобразуется согласно формуле:
(d†)′ = d†U†,
или
(d†)′ = d†U–1.
Сменив обозначения,
χ1 = (ψ1)*, χ2 = (ψ2)* ,
распишем последнюю формулу (d†)′ = d†U–1 подробно:
![]() .
.
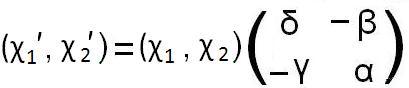
Это соотношение эквивалентно линейному преобразованию:
χ1′ = δχ1 – γχ2,
χ2′ = – βχ1 + αχ2.
Отсюда получаем:
![]()
Итак, в двумерном комплексном евклидовом пространстве есть два типа объектов, описывающих направления в трёхмерном евклидовом пространстве, — контравариантные и ковариантные спиноры, а пространство в таком случае называется спинорным.
Контравариантные спиноры при поворотах преобразуются по формуле:
![]()
Ковариантные спиноры при поворотах преобразуются по формуле
![]()
или
 .
.
Два последних матричных равенства взаимно транспонированные.
Далее вводится скалярное произведение одного ко- и одного контравариантного спинора:
[χ , ψ] = χ1 ψ1 + χ2 ψ2.
Скалярное произведение является инвариантом относительно поворотов:
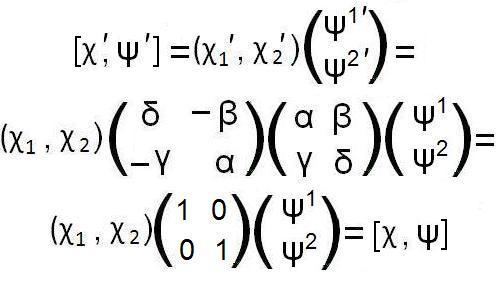 ,
,
поскольку Δ = αδ – βγ = 1.
Дальнейшее развитие теории спиноров приводит к спинорному исчислению, которое находит широкое применение в математике и теоретической физике.
Последние комментарии